#include <Eigen/Geometry>#include "impl/eigen_utils_impl.hpp"
Include dependency graph for eigen_utils.hpp:
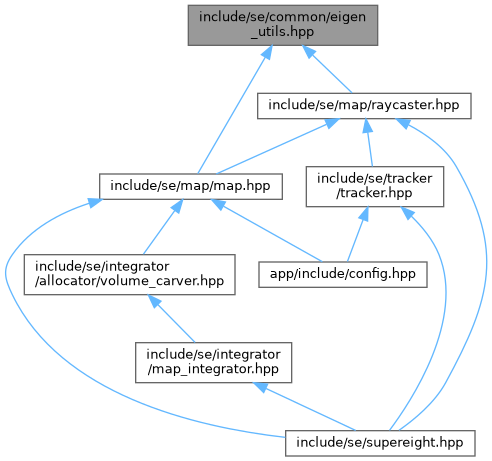
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | se |
| Helper wrapper to allocate and de-allocate octants in the octree. | |
| namespace | se::eigen |
| Helper functions for Eigen objects. | |
Functions | |
| template<typename ScalarT , int Dim> | |
| Eigen::AlignedBox< ScalarT, Dim > | se::eigen::dilate_erode (const Eigen::AlignedBox< ScalarT, Dim > &box, const ScalarT distance) |
Morphologically dilate or erode an axis aligned box by some distance. | |
| template<typename ScalarT , int Mode, int Options> | |
| Eigen::AlignedBox< ScalarT, 3 > | se::eigen::transform (const Eigen::Transform< ScalarT, 3, Mode, Options > &T_BA, const Eigen::AlignedBox< ScalarT, 3 > &box_A) |
Transform a 3D axis aligned box box_A expressed in frame A to frame B using the transform T_BA. | |
| template<typename T , typename U , typename V > | |
| void | se::eigen::clamp (Eigen::MatrixBase< T > &x, const Eigen::MatrixBase< U > &low, const Eigen::MatrixBase< V > &high) |
Clamp the coefficients of v between those of low and high. | |
| template<typename T , typename U , typename V > | |
| void | se::eigen::clamp (Eigen::ArrayBase< T > &x, const Eigen::ArrayBase< U > &low, const Eigen::ArrayBase< V > &high) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. | |