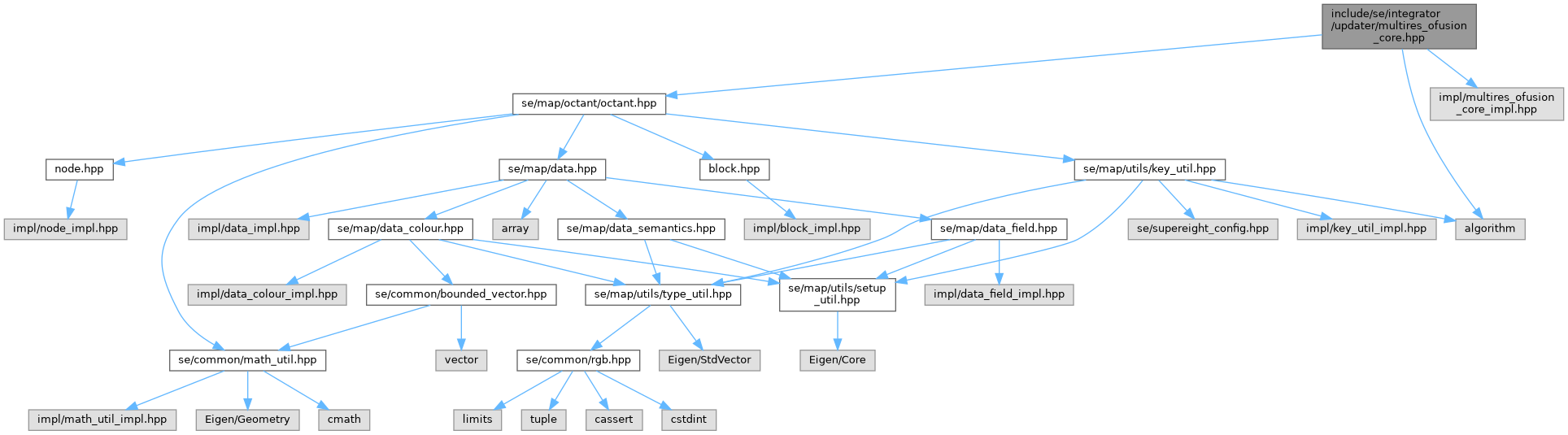
#include <algorithm>#include <se/map/octant/octant.hpp>#include "impl/multires_ofusion_core_impl.hpp"
Include dependency graph for multires_ofusion_core.hpp:
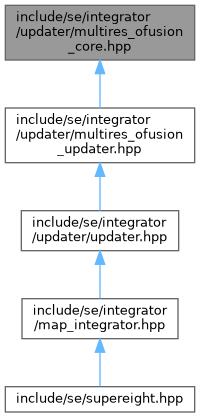
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | se |
| Helper wrapper to allocate and de-allocate octants in the octree. | |
| namespace | se::updater |
Functions | |
| template<typename ConfigT > | |
| float | se::compute_three_sigma (const field_t depth_value, const float sigma_min, const float sigma_max, const ConfigT config) |
| Compute the estimated uncertainty boundary for a given depth measurement. | |
| template<typename ConfigT > | |
| float | se::compute_tau (const field_t depth_value, const float tau_min, const float tau_max, const ConfigT config) |
| Compute the estimated wall thickness tau for a given depth measurement. | |
| template<typename DataT , typename ConfigT > | |
| bool | se::updater::update_voxel (DataT &data, const float range_diff, const float tau, const float three_sigma, const ConfigT config) |
| Update a field with a new measurement, a weighting of 1 is considered for the new measurement. | |
| template<typename DataT , typename ConfigT > | |
| bool | se::updater::free_voxel (DataT &voxel_data, const ConfigT config) |
| Reduce the node data by the minimum log-odd occupancy update per iteration. | |
| template<typename NodeT , typename BlockT > | |
| NodeT::DataType | se::updater::propagate_to_parent_node (OctantBase *octant_ptr, const timestamp_t timestamp) |
| Propagate a summary of the eight nodes children to its parent. | |
| template<typename BlockT > | |
| void | se::updater::propagate_block_to_coarsest_scale (OctantBase *octant_ptr) |
| Summariese the values from the current integration scale recursively up to the block's max scale. | |