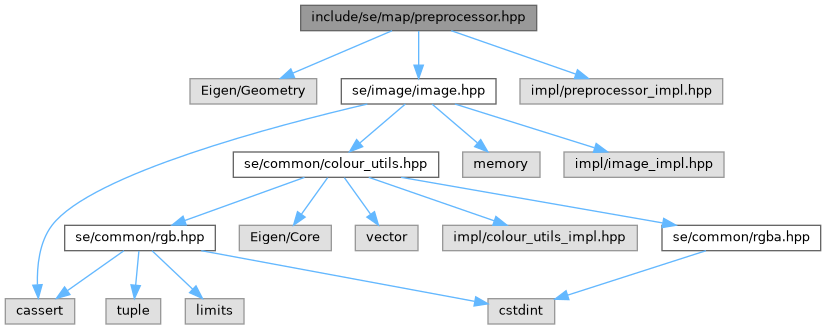
Include dependency graph for preprocessor.hpp:
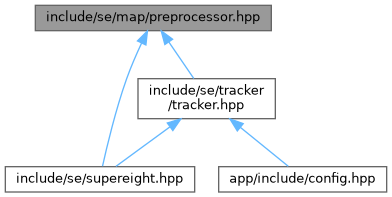
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | se |
| Helper wrapper to allocate and de-allocate octants in the octree. | |
| namespace | se::preprocessor |
Functions | |
| Image< size_t > | se::preprocessor::downsample_depth (const Image< float > &input_depth_img, Image< float > &output_depth_img) |
Perform median downsampling on input_depth_img and save the result in output_depth_img. | |
| template<typename SensorT > | |
| void | se::preprocessor::depth_to_point_cloud (se::Image< Eigen::Vector3f > &point_cloud_C, const se::Image< float > &depth_image, const SensorT &sensor) |
| void | se::preprocessor::point_cloud_to_depth (se::Image< float > &depth_image, const se::Image< Eigen::Vector3f > &point_cloud_X, const Eigen::Isometry3f &T_CX) |
| template<bool NegY> | |
| void | se::preprocessor::point_cloud_to_normal (se::Image< Eigen::Vector3f > &out, const se::Image< Eigen::Vector3f > &in) |
| NegY should only be true when reading an ICL-NUIM dataset which has a left-handed coordinate system (the y focal length will be negative). | |
| void | se::preprocessor::half_sample_robust_image (se::Image< float > &out, const se::Image< float > &in, const float e_d, const int r) |