Configuration parameters common for all sensor models. More...
#include <sensor.hpp>
Public Member Functions | |
| void | readYaml (const std::string &filename) |
| Reads the struct members from the "sensor" node of a YAML file. | |
| Config | operator/ (const float downsampling_factor) const |
Public Attributes | |
| int | width = 0 |
| The width of images produced by the sensor in pixels. | |
| int | height = 0 |
| The height of images produced by the sensor in pixels. | |
| float | near_plane = 0.01f |
| The sensor's near plane in metres. | |
| float | far_plane = 10.0f |
| The sensor's far plane in metres. | |
| Eigen::Isometry3f | T_BS = Eigen::Isometry3f::Identity() |
| The transformation from the sensor frame S to the body frame B. | |
| std::vector< float > | pixel_voxel_ratio_per_scale = {1.5f, 3.0f, 6.0f} |
| The pixel-size to voxel-size ratio thresholds, in ascendig order and in physical coordinates, for computing the integration scale. | |
Friends | |
| std::ostream & | operator<< (std::ostream &os, const Config &c) |
Detailed Description
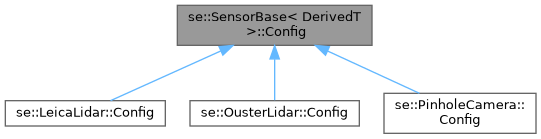
struct se::SensorBase< DerivedT >::Config
Configuration parameters common for all sensor models.
Member Function Documentation
◆ readYaml()
| void se::SensorBase< DerivedT >::Config::readYaml | ( | const std::string & | filename | ) |
Reads the struct members from the "sensor" node of a YAML file.
Members not present in the YAML file aren't modified.
◆ operator/()
|
inline |
Friends And Related Symbol Documentation
◆ operator<<
|
friend |
Member Data Documentation
◆ width
| int se::SensorBase< DerivedT >::Config::width = 0 |
The width of images produced by the sensor in pixels.
◆ height
| int se::SensorBase< DerivedT >::Config::height = 0 |
The height of images produced by the sensor in pixels.
◆ near_plane
| float se::SensorBase< DerivedT >::Config::near_plane = 0.01f |
The sensor's near plane in metres.
Avoid setting to 0 since numerical issues may arise.
◆ far_plane
| float se::SensorBase< DerivedT >::Config::far_plane = 10.0f |
The sensor's far plane in metres.
Avoid setting to infinity since performance may degrade significantly, for example with depth images containing really large erroneous measurements.
◆ T_BS
| Eigen::Isometry3f se::SensorBase< DerivedT >::Config::T_BS = Eigen::Isometry3f::Identity() |
The transformation from the sensor frame S to the body frame B.
◆ pixel_voxel_ratio_per_scale
| std::vector<float> se::SensorBase< DerivedT >::Config::pixel_voxel_ratio_per_scale = {1.5f, 3.0f, 6.0f} |
The pixel-size to voxel-size ratio thresholds, in ascendig order and in physical coordinates, for computing the integration scale.
See also se::SensorBase::computeIntegrationScale(). For example:
pixel/voxel < pixel_voxel_ratio_per_scale[0]→scale = 0pixel/voxel < pixel_voxel_ratio_per_scale[1]→scale = 1- etc.
The documentation for this struct was generated from the following file:
- include/se/sensor/sensor.hpp