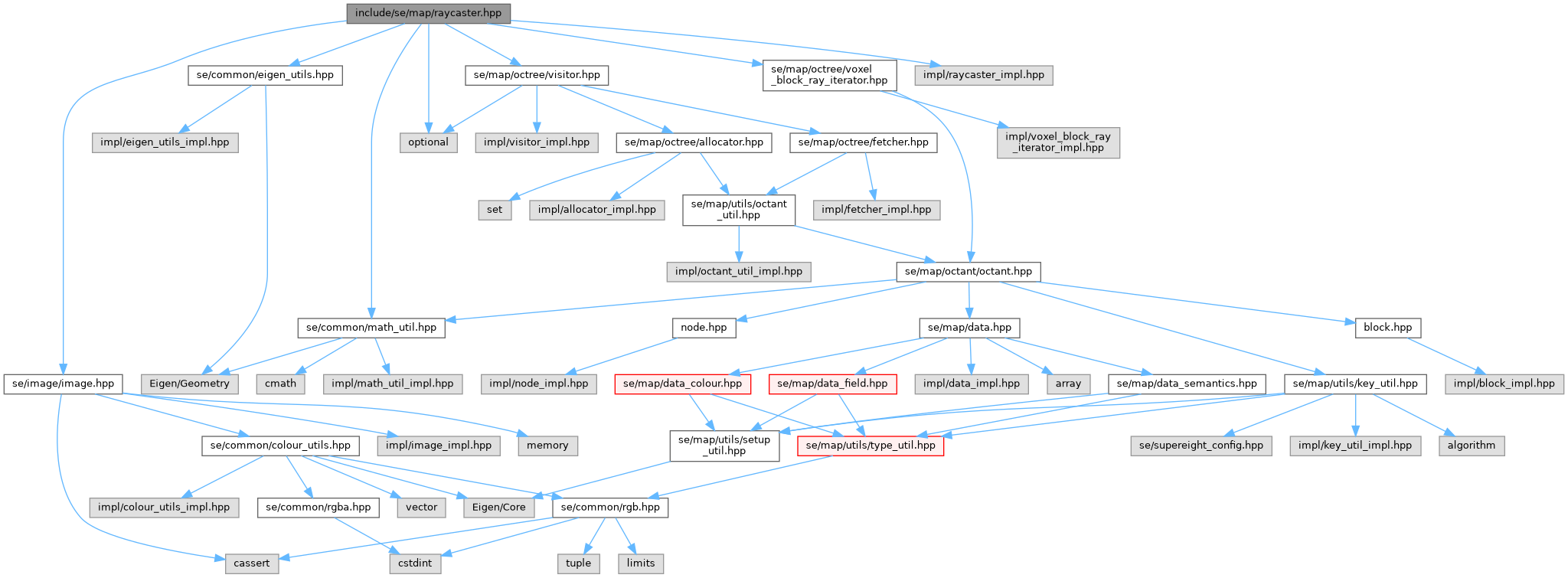
#include <optional>#include <se/common/colour_utils.hpp>#include <se/common/eigen_utils.hpp>#include <se/common/math_util.hpp>#include <se/common/rgb.hpp>#include <se/common/rgba.hpp>#include <se/image/image.hpp>#include <se/map/octree/visitor.hpp>#include <se/map/octree/voxel_block_ray_iterator.hpp>#include <se/map/preprocessor.hpp>#include "impl/raycaster_impl.hpp"
Include dependency graph for raycaster.hpp:
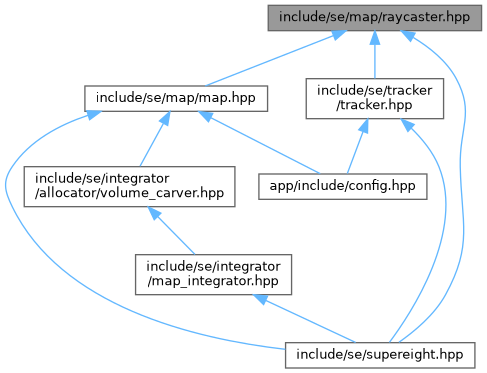
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | se |
| Helper wrapper to allocate and de-allocate octants in the octree. | |
| namespace | se::raycaster |
Functions | |
| void | se::raycaster::point_cloud_to_normal (se::Image< Eigen::Vector3f > &normals, const se::Image< Eigen::Vector3f > &point_cloud, const bool is_lhc=false) |
| template<typename MapT > | |
| std::enable_if_t< MapT::fld_==se::Field::Occupancy, std::optional< Eigen::Vector4f > > | se::raycaster::raycast (MapT &map, const typename MapT::OctreeType &octree, const Eigen::Vector3f &ray_origin_W, const Eigen::Vector3f &ray_dir_W, const float t_near, const float t_far, const float mu, const float step, const float largestep) |
| template<typename MapT > | |
| std::enable_if_t< MapT::fld_==se::Field::TSDF, std::optional< Eigen::Vector4f > > | se::raycaster::raycast (MapT &map, const typename MapT::OctreeType &octree, const Eigen::Vector3f &ray_origin_W, const Eigen::Vector3f &ray_dir_W, const float t_near, const float t_far, const float mu, const float step, const float largestep) |
| template<typename MapT , typename SensorT > | |
| void | se::raycaster::raycast_volume (const MapT &map, const SensorT &sensor, const Eigen::Isometry3f &T_WS, se::Image< Eigen::Vector3f > &surface_point_cloud_W, se::Image< Eigen::Vector3f > &surface_normals_W, se::Image< int8_t > &surface_scale, se::Image< colour_t > *surface_colour=nullptr, se::Image< id_t > *surface_id=nullptr) |
| template<typename GetDiffuseColourF > | |
| void | se::raycaster::render_volume (se::Image< RGBA > &render, const se::Image< Eigen::Vector3f > &surface_points_W, const se::Image< Eigen::Vector3f > &surface_normals_W, const GetDiffuseColourF get_diffuse_colour, const Eigen::Vector3f &light_source_W=Eigen::Vector3f::Zero(), const RGB ambient_light=RGB{0x1A, 0x1A, 0x1A}) |
Render the surface represented by surface_points_W and surface_normals_W into render. | |
| void | se::raycaster::render_volume_scale (se::Image< RGBA > &render, const se::Image< Eigen::Vector3f > &surface_points_W, const se::Image< Eigen::Vector3f > &surface_normals_W, const se::Image< int8_t > &surface_scale, const Eigen::Vector3f &light_source_W=Eigen::Vector3f::Zero(), const RGB ambient_light=RGB{0x1A, 0x1A, 0x1A}) |
Render the surface represented by surface_points_W and surface_normals_W into render, coloured using the scale from surface_scale. | |
| void | se::raycaster::render_volume_colour (se::Image< RGBA > &render, const se::Image< Eigen::Vector3f > &surface_points_W, const se::Image< Eigen::Vector3f > &surface_normals_W, const se::Image< RGB > &surface_colour, const Eigen::Vector3f &light_source_W=Eigen::Vector3f::Zero(), const RGB ambient_light=RGB{0x1A, 0x1A, 0x1A}) |
Render the surface represented by surface_points_W and surface_normals_W into render, coloured using the colours from surface_colour. | |
| template<typename MapT , typename SensorT > | |
| Image< id_t > | se::raycaster::lookup_ids (const MapT &map, const Image< float > &depth, const SensorT &sensor, const Eigen::Isometry3f &T_WC) |
Given a map map and a depth image depth and the sensor characteristics as provided by sensor and the pose in the map frame T_WC, this function extracts the ids for each pixel in the depth image. | |